- Published on
SPRIM:让降阶建模保持"原汁原味"的结构魔法
- Authors

- Name
- Harry Crab
SPRIM:让降阶建模保持"原汁原味"的结构魔法
🧠 这是我的第二篇技术博客。今天咱们聊一个听起来很"玄学"但实际上很实用的问题——如何让降阶建模保持"原汁原味"?就像你想把一桌满汉全席压缩成一道菜,但还要保持每道菜的精髓。这听起来像不可能完成的任务,但SPRIM做到了!
从"满汉全席"到"一道菜"的降阶难题
想象一下,你有一个复杂的电路系统,比如一块芯片的互连线网络。这个系统可能有几万个节点,几百万个元件,用数学语言描述就是:
其中G是电导矩阵,C是电容矩阵,B是输入矩阵,x是状态变量,I是输入电流。
现在问题来了:这个系统太复杂了,仿真一次要几个小时,但你的老板明天就要结果!怎么办?
传统思路是"降阶"——把高维系统压缩成低维系统,就像把满汉全席压缩成一道菜。但这里有个关键问题:压缩后的系统还能保持原来的"味道"吗?
🔌 MNA:电路建模的"通用语言"
在深入降阶之前,我们需要先理解MNA(Modified Nodal Analysis,修正节点分析),这是现代电路仿真的基础。就像学做菜要先认识各种调料一样,学电路仿真要先认识MNA!
🎯 MNA的基本思想
MNA是基尔霍夫电流定律(KCL)和基尔霍夫电压定律(KVL)的数学表达。简单来说:
- ⚡ 节点电压:每个节点都有一个电压值
- 🔄 支路电流:每条支路都有一个电流值
- 🔗 元件约束:每个元件都有其电压-电流关系
🔬 MNA方程的物理意义
这个方程就像电路的"食谱",告诉我们如何把各种"食材"(元件)组合成一道"菜"(电路响应)。让我们逐个"品尝"每个部分:
🛡️ G矩阵(电导矩阵):
- 描述电阻性元件的贡献(就像调味料,决定"味道"的基调)
- 对角线元素:连接到该节点的所有电导之和(就像每种调料的总量)
- 非对角线元素:连接两个节点的电导(取负值)(就像调料之间的相互作用)
- 物理意义:描述系统的"静态"特性(决定电路的"基本味道")
⚡ C矩阵(电容矩阵):
- 描述电容性元件的贡献(就像食材的"新鲜度",影响口感的变化)
- 对角线元素:连接到该节点的所有电容之和(就像每种食材的储存量)
- 非对角线元素:连接两个节点的电容(取负值)(就像食材之间的相互影响)
- 物理意义:描述系统的"动态"特性(决定电路的"口感变化")
🚪 B矩阵(输入矩阵):
- 描述外部激励如何影响系统(就像"外部食材"如何进入厨房)
- 每列对应一个输入端口(就像不同的"入口")
- 物理意义:描述"外部世界"如何与系统交互
📊 x(t)向量(状态变量):
- 包含节点电压和某些支路电流(就像厨房里各种食材的"状态")
- 物理意义:描述系统在时刻t的"状态"(就像"此时此刻"的厨房状况)
💧 I(t)向量(输入电流):
- 外部注入的电流源(就像"外部水源")
- 物理意义:系统的"驱动信号"(决定"动力来源")
🔄 MNA的时域到频域转换
通过拉普拉斯变换,时域方程变为频域方程(就像把"实时直播"变成"录播回放"):
其中:
- 是复频率变量(就像"时空坐标")
- 是衰减因子(实部)(就像"衰减速度")
- 是角频率(虚部)(就像"振动频率")
- 是虚数单位(就像"数学魔法师")
系统的传递函数为:
这个传递函数就像电路的"身份证",描述了输入电流到输出电压的映射关系,是降阶建模的核心目标(就像我们要"复制"这个身份证,但要保持其"真实性")。
🔬 传递函数简述
这个传递函数是如何得来的呢?简单来说:
- 时域方程:从MNA方程 开始
- 拉普拉斯变换:将时域微分方程转换为频域代数方程
- 求解状态变量:
- 定义输出:
- 得到传递函数:
这个公式通过拉普拉斯变换将时域电路方程转换为频域系统特性,是连接时域与频域的数学桥梁。
传统降阶方法的"失味"问题
在SPRIM出现之前,主流的降阶方法是PRIMA(Passive Reduced-order Interconnect Macromodeling)。PRIMA的思路很直接:
- 用Krylov子空间方法生成降阶基
- 对原系统进行投影
- 得到低维降阶模型
PRIMA确实能工作,但它有个致命缺陷:丢失了原系统的物理结构!
这就像你把满汉全席的每道菜都打碎,混在一起,然后重新组合。虽然营养还在,但原来的层次感、口感、视觉美感全都没了。
具体来说,PRIMA丢失了什么?
- 分块结构:原电路中不同端口、不同功能模块的边界信息
- 互易性:电路的物理对称性
- 二阶结构:可以直接写成力学/电路方程的形式
SPRIM的"结构保持"魔法
2004年,Roland W. Freund提出了SPRIM(Structure-Preserving Reduced-Order Interconnect Macromodeling),这个方法的核心理念是:不仅要压缩,还要保持"原汁原味"!
🎯 SPRIM的核心创新
SPRIM的魔法在于基向量的选择。它不仅包含Krylov子空间,还额外构造了一组"结构扩展向量",使得降阶模型能够保持:
- 分块结构:降阶后模型的分块映射物理端口、电路结构
- 二阶形式:可直接写成力学/电路常见的二阶方程
- 互易性:降阶模型的传递函数依然对称,物理可合成
- 被动性:满足实际电路设计的能量守恒要求
这就像不是简单地把菜打碎重组,而是精心设计一个"微缩版满汉全席",每道菜都保持原来的特色,只是分量小一点。
🔬 SPRIM的数学魔法
让我们深入看看SPRIM是如何实现这个"魔法"的:
🎭 Krylov子空间基础
首先,SPRIM基于Krylov子空间方法。对矩阵对,其q阶Krylov子空间定义为:
详细解释:
🎯 Krylov子空间的定义:
- 表示由向量 张成的向量空间(就像用几个"基础动作"组合出复杂的"舞蹈")
- 是系统矩阵,描述系统的动态特性(就像"舞蹈编排")
- 是起始向量,通常是输入矩阵(就像"起始姿势")
- 是子空间的维度,决定了逼近精度(就像"舞蹈的复杂度")
🌟 物理意义: Krylov子空间可以理解为"系统响应的主要模式"。就像傅里叶级数用正弦波逼近任意信号,Krylov子空间用系统的主要响应模式逼近完整的系统行为(就像用几个"主旋律"来概括整首"交响乐")。
🔧 在RLC网络建模中的具体含义:
- :这是系统的"动态矩阵"(就像"发动机")
- 是系统在扩展点 处的"阻抗"(就像"阻力")
- 乘以 后,描述了电容对系统动态的贡献(就像"惯性")
- :这是系统的"输入响应"(就像"油门响应")
- 描述了外部输入如何影响系统状态(就像"踩油门后车的反应")
🎯 扩展点 的选择:
- 是复平面上的一个点,通常选择在感兴趣的频率范围内(就像"选择观察角度")
- 不同的 会导致不同的逼近特性(就像"不同角度看到的风景不同")
- 选择 对应直流分析(就像"静态照片"),选择 对应交流分析(就像"动态视频")
🎯 Moment Matching:逼近精度的数学保证
📊 Moment的定义: 系统的moment定义为传递函数在扩展点 处的泰勒展开系数(就像用"多项式"来"拟合"复杂函数):
其中:
- 是零阶moment(直流增益)(就像"基础高度")
- 是一阶moment(一阶导数)(就像"斜率")
- 是二阶moment(二阶导数)(就像"曲率")
- 以此类推...(就像"更精细的形状描述")
🌟 Moment Matching的物理意义:
- 零阶moment匹配:保证在扩展点处的增益正确(就像"保证照片的亮度")
- 一阶moment匹配:保证在扩展点处的斜率正确(就像"保证照片的对比度")
- 二阶moment匹配:保证在扩展点处的曲率正确(就像"保证照片的立体感")
- 高阶moment匹配:保证在扩展点附近的高阶特性正确(就像"保证照片的细节")
🔗 Krylov子空间与Moment Matching的关系: Krylov子空间方法能够自动匹配前q个moment,这是其强大之处(就像"自动调色"功能)。具体来说:
这意味着用q维Krylov子空间进行降阶,就能保证前q个moment的匹配,从而在扩展点附近获得高精度的逼近(就像"用q个参数就能调出q种颜色效果")。
🏗️ 结构扩展基构造
SPRIM的关键创新在于结构扩展基构造。传统的PRIMA只使用Krylov子空间基,而SPRIM在此基础上构造了扩展基(就像在"基础配方"上添加"秘制调料"):
详细解释:
🔧 扩展基的构造原理:
- 是传统的Krylov子空间基,维度为 (就像"基础食材")
- 是结构扩展向量,维度为 (就像"秘制调料")
- 是扩展后的基矩阵,维度为 (就像"完整配方")
🎯 结构扩展向量的设计: SPRIM根据原系统的分块结构设计扩展向量(就像根据"房间布局"设计"家具摆放")。假设原系统矩阵具有以下分块形式:
其中:
- 对应端口节点(就像"客厅")
- 对应内部节点(就像"卧室")
- 对应端口与内部的耦合(就像"走廊")
🔧 扩展向量的具体构造:
其中:
- 对应端口部分的扩展(就像"客厅的装饰")
- 对应内部部分的扩展(就像"卧室的装饰")
这种构造确保了降阶后的系统保持原系统的分块结构,从而保持物理意义(就像"保持房间的功能分区")。
⚙️ Block Arnoldi算法:高效生成Krylov子空间
🎯 Block Arnoldi算法的基本思想: Block Arnoldi是Arnoldi算法的推广,用于处理多输入多输出系统(就像从"单人舞"升级到"群舞")。其核心思想是:
- 🚀 初始化:选择起始块 ,并进行QR分解(就像"选角"和"分组")
- 🔄 迭代过程:对每个块 ,计算 ,然后与前面的所有块正交化(就像"排练"和"协调")
- 📐 递归关系:(就像"舞蹈编排")
📊 数学表达:
其中:
- 是正交基矩阵(就像"舞者阵容")
- 是上Hessenberg矩阵(就像"舞蹈编排表")
- 是下一个块的系数(就像"下一个动作的指令")
🌟 物理意义: Block Arnoldi算法能够同时处理多个输入端口,这对于多端口电路网络至关重要(就像"同时指挥多个乐器")。它保证了生成的基向量之间的正交性,提高了数值稳定性(就像"确保每个乐器都有独特的音色")。
🔄 Lanczos算法:对称系统的特殊优化
🎯 Lanczos算法的特点: 当系统矩阵 对称时,可以使用更高效的Lanczos算法(就像"在对称的舞台上,舞蹈编排可以更简单")。Lanczos算法是Arnoldi算法的特化版本,具有以下特点:
- 📐 三对角化:生成的 矩阵是三对角的(就像"简化的舞蹈编排表")
- ⚡ 计算效率:每次迭代只需要与前面两个块正交化(就像"只需要记住前两个动作")
- 🛡️ 数值稳定性:对于对称系统,数值稳定性更好(就像"对称的舞台更不容易出错")
📊 数学表达:
其中 是三对角矩阵(就像"简化的编排表")。
🎯 在SPRIM中的应用: 对于RLC网络,如果选择合适的扩展点,系统矩阵可能具有对称性,此时使用Lanczos算法可以提高计算效率(就像"在对称的舞台上,舞蹈编排可以更简单")。
🚀 双倍moment matching
SPRIM最令人震撼的特性是:在同等降阶空间维度n下,可以实现2n阶moment matching!(就像"用同样的食材,做出双倍的味道"!)
详细解释:
🎯 双倍moment matching的数学原理: 传统PRIMA使用n维Krylov子空间,只能匹配n个moment。而SPRIM通过结构扩展,实际上使用了2n维的扩展空间,因此能够匹配2n个moment(就像"从单声道升级到立体声")。
📊 数学证明: 设原系统传递函数为 ,在扩展点 处的泰勒展开为(就像"用多项式逼近复杂函数"):
其中moment 为:
🎯 PRIMA的moment matching: 使用n维Krylov子空间 ,PRIMA能够匹配前n个moment(就像"只能调出n种颜色"):
🚀 SPRIM的moment matching: 使用扩展基 ,SPRIM能够匹配前2n个moment(就像"能调出2n种颜色"):
🌟 物理意义:
- 零阶到(n-1)阶moment:由Krylov子空间 保证(就像"基础色调")
- n阶到(2n-1)阶moment:由结构扩展向量 保证(就像"高级色调")
这种双倍moment matching能力使得SPRIM在扩展点附近具有更高的逼近精度,特别是在高频段的表现明显优于PRIMA(就像"从黑白照片升级到彩色照片")。
🎯 实际效果: 在同等计算复杂度下,SPRIM能够:
- 在更宽的频域范围内保持高精度(就像"更广的色域")
- 更好地捕捉系统的动态特性(就像"更丰富的细节")
- 提供更稳定的数值结果(就像"更稳定的画质")
🏗️ SPRIM算法流程
SPRIM的算法流程可以分为以下几个关键步骤:
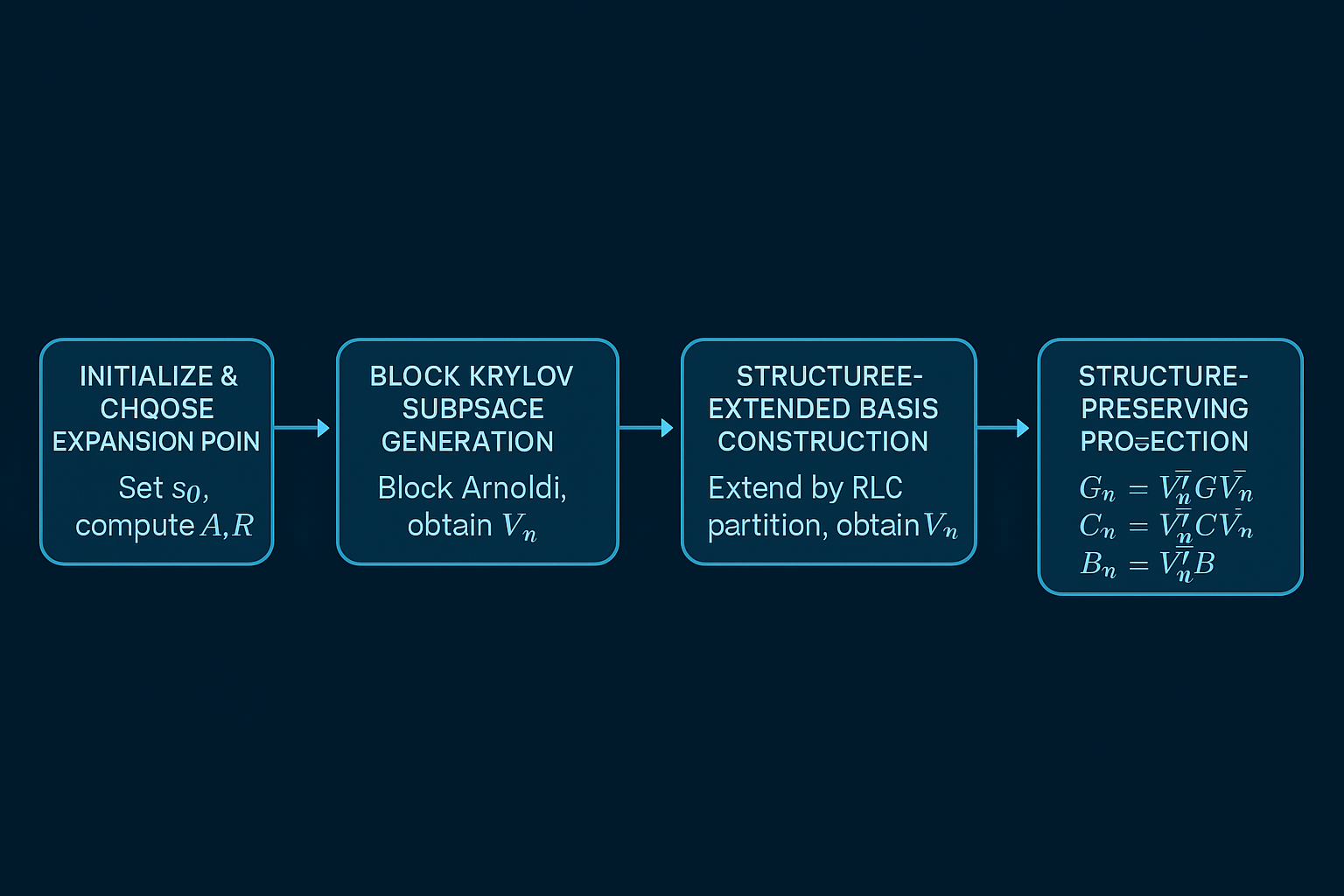
第一步:初始化与扩展点选择 设定扩展点,计算,
第二步:Block Krylov子空间生成 使用Block Arnoldi或Lanczos算法,生成目标维度的Krylov子空间基
第三步:结构扩展基构造 按照RLC电路分块,对进行结构性扩展,得到
🔄 第四步:结构保持投影
详细解释:
🎯 投影的数学原理: 投影操作 可以理解为(就像"3D投影到2D屏幕"):
- 将原系统状态 投影到降阶空间:(就像"把立体物体投影到平面")
- 在降阶空间中应用系统矩阵:(就像"在平面上进行变换")
- 将结果映射回原空间:(就像"把结果映射回立体空间")
🌟 投影的物理意义:
- :降阶后的电导矩阵,保持原系统的电阻特性
- :降阶后的电容矩阵,保持原系统的动态特性
- :降阶后的输入矩阵,保持原系统的输入输出关系
🛡️ 结构保持的保证: 由于 是根据原系统分块结构设计的,投影后的矩阵 也保持相应的分块结构,从而保证了物理意义的保持(就像"保持房间的功能分区")。
🎯 第五步:输出降阶模型 降阶系统既可以一阶形式输出,也可转为物理直观的二阶形式(就像"可以选择不同的展示方式")
📊 一阶形式:
🏗️ 二阶形式:
其中:
- :质量矩阵(对应电感)(就像"惯性")
- :阻尼矩阵(对应电阻)(就像"阻力")
- :刚度矩阵(对应电容的倒数)(就像"弹性")
🎨 物理直觉理解
让我们用更直观的方式理解SPRIM:
想象你有一个复杂的电路网络,包含多个功能模块:电源管理、信号处理、数据存储等。每个模块都有其特定的物理特性和边界条件。
传统的PRIMA就像把整个电路"打碎"成最基本的元件,然后重新组合。虽然功能还在,但模块间的边界、接口特性都丢失了。
而SPRIM就像精心设计一个"微缩版"电路,每个功能模块都保持其原有的结构和特性,只是规模变小了。这样,降阶后的模型不仅功能正确,还能保持原系统的物理直觉和工程意义。
PRIMA vs SPRIM:一场"味道"的较量
让我们通过一个对比表格来看看两者的差异:
| 特性 | PRIMA | SPRIM |
|---|---|---|
| 被动性 | ✅ | ✅ |
| 结构保持 | ❌ | ✅(分块、互易、二阶结构) |
| moment matching阶数 | n | 2n |
| 可物理合成性 | 一般 | 强(易于电路实现与解释) |
| 算法复杂度 | O(mn²) | O(mn²)(同阶,不增加复杂度) |
SPRIM在理论和工程上都具有显著优势,尤其适用于要求高精度和可解释性的仿真任务。
🔍 深入理解moment matching
moment matching是降阶建模中的核心概念。简单来说,moment描述了系统在不同频率下的响应特性(就像"用不同的镜头观察同一个物体")。
🌟 Moment的物理意义: Moment可以理解为系统在不同"时间尺度"上的响应特性:
- 零阶moment:系统的稳态响应(就像"物体的基本形状")
- 一阶moment:系统对变化的敏感度(就像"物体对推力的反应")
- 二阶moment:系统响应的"惯性"(就像"物体的质量特性")
- 高阶moment:更精细的动态特性(就像"物体的细微特征")
📊 Moment Matching的数学基础: 设原系统传递函数为 ,降阶系统传递函数为 ,在扩展点 处(就像"在特定角度观察物体"):
Moment matching要求: 对于 (就像"确保从每个角度看到的形状都一致")
⚠️ 传统PRIMA的局限: PRIMA只能匹配n个moment,这意味着:
- 在扩展点附近有良好的逼近(就像"只在特定角度清晰")
- 远离扩展点时逼近精度下降(就像"其他角度模糊")
- 高频段可能出现较大误差(就像"细节丢失")
🚀 SPRIM的优势: SPRIM能匹配2n个moment,这意味着:
- 在更宽的频域范围内保持高精度(就像"多个角度都清晰")
- 更好地捕捉系统的动态特性(就像"捕捉更多细节")
- 提供更稳定的数值结果(就像"更稳定的观察")
🎯 实际应用中的意义: 在电路仿真中,moment matching的阶数直接影响:
- 仿真精度:更高的moment matching意味着更高的精度(就像"更清晰的图像")
- 计算效率:在同等精度下,SPRIM可以用更小的降阶维度(就像"用更少的参数达到同样效果")
- 数值稳定性:更好的moment matching通常意味着更好的数值稳定性(就像"更稳定的算法")
这种双倍moment matching能力不是偶然的,而是SPRIM结构保持设计的必然结果。通过保持原系统的物理结构,SPRIM能够更有效地利用降阶空间,实现更高的逼近精度(就像"通过保持物体的内在结构,更好地复制其外观")。
实验验证:SPRIM的"实战"表现
🧪 实验设计
论文在多个真实电路网络上进行了全面测试:
- PEEC离散化电磁网络:模拟芯片互连线的电磁特性
- 大型IC封装互连:模拟现代芯片封装的复杂互连结构
- 有限元机械结构:如MEMS器件的力学特性
📊 实验结果
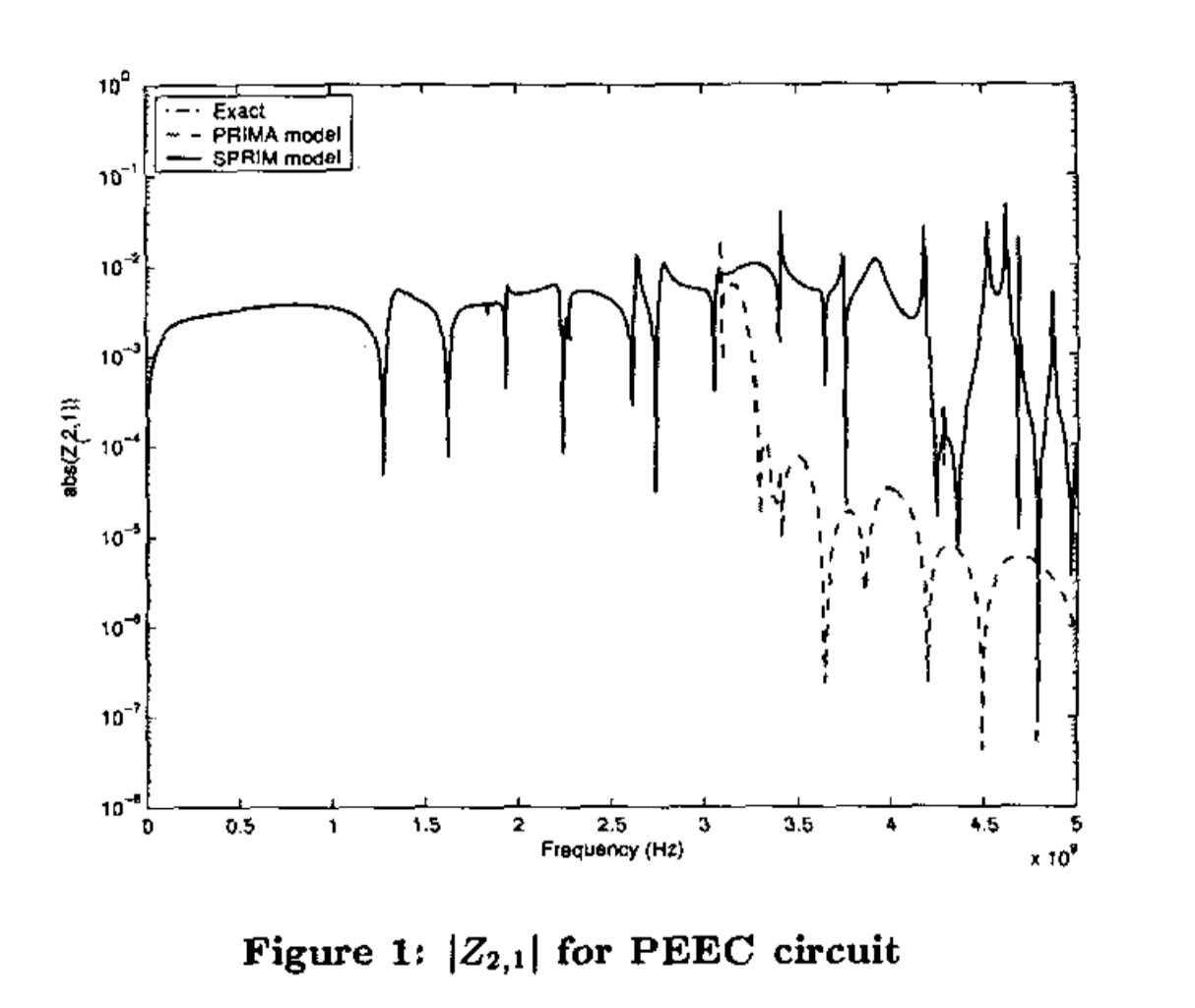
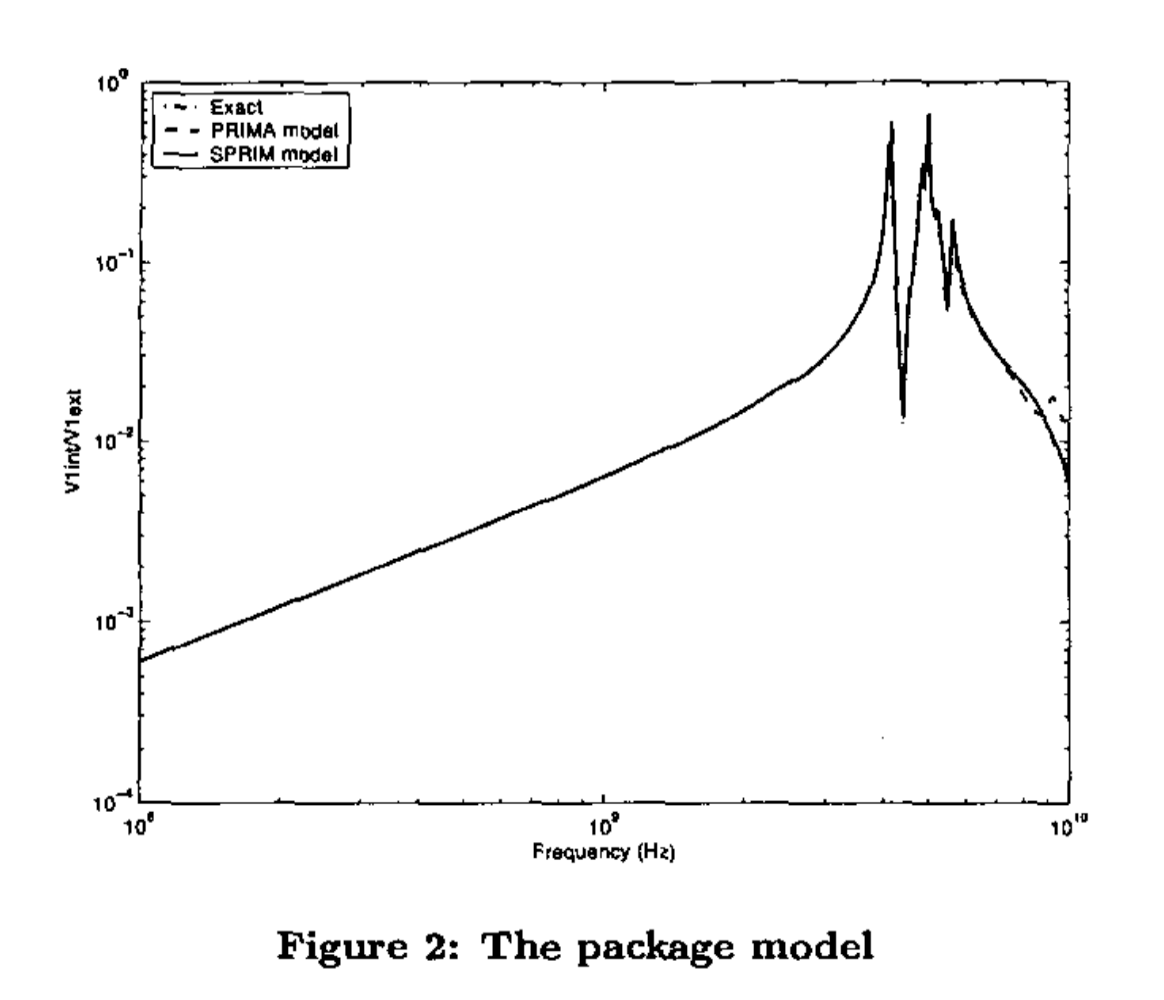
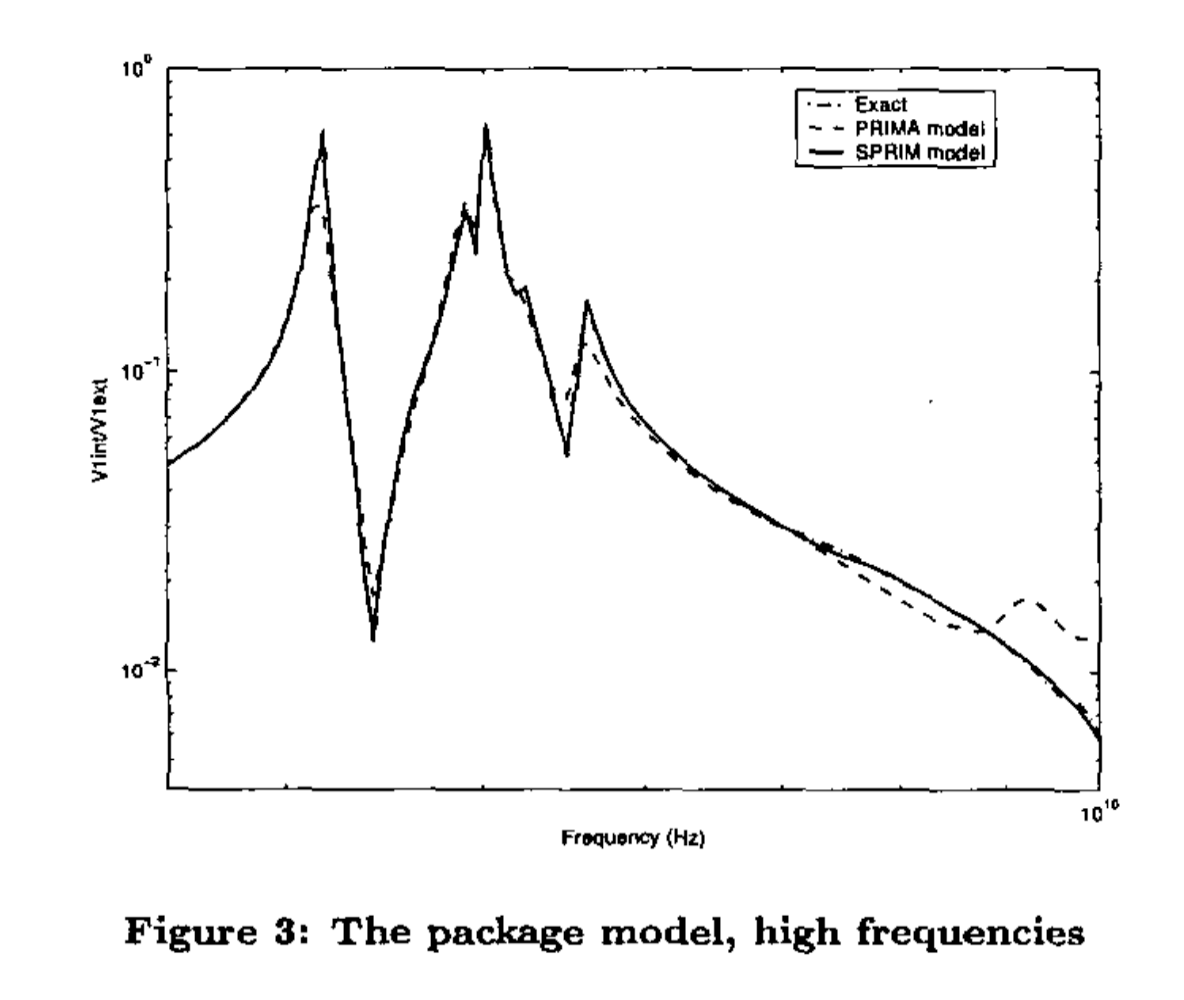
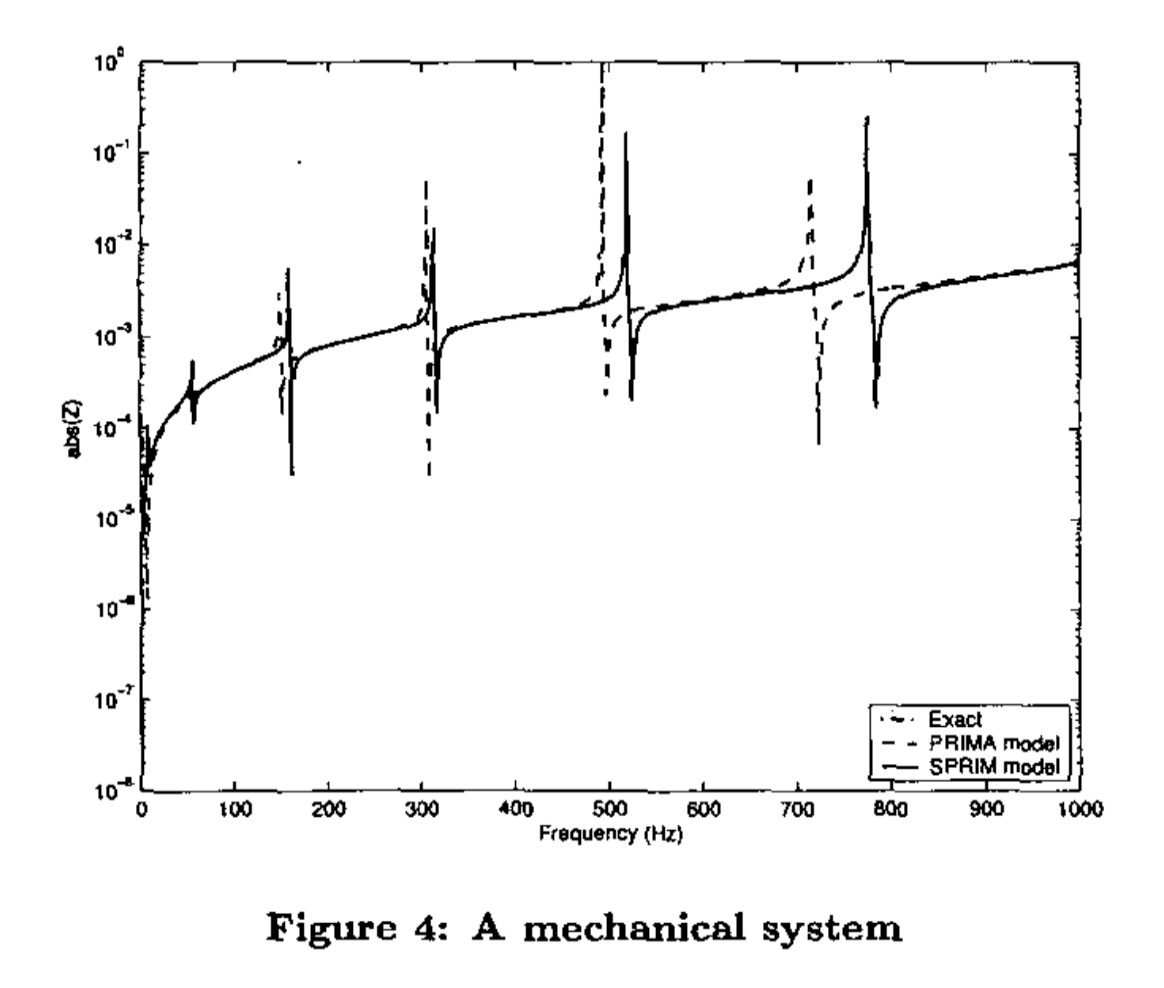
实验结果令人震撼:
传递函数精度:SPRIM降阶模型在同等维度下传递函数与全阶模型几乎完全重合,而PRIMA在高频段误差显著。
收敛特性:SPRIM用更低的状态空间维度即可获得高保真逼近,这意味着更快的仿真速度。
物理属性保持:被动性、互易性等关键物理属性在SPRIM降阶后依然保持,这对于实际电路设计至关重要。
技术深度:SPRIM的数学之美
🔬 被动性证明
SPRIM的被动性保证来自于其特殊的投影构造。通过结构保持投影,降阶系统的传递函数满足:
🛡️ 被动性的数学定义: 一个系统被称为被动的,如果对于所有输入 和所有时间 ,满足(就像"能量守恒定律"):
其中 是系统的输出。这表示系统不能产生能量,只能消耗或存储能量(就像"不能无中生有")。
📊 被动性的频域条件: 在频域中,被动性等价于(就像"在频率域的能量守恒"):
- 在右半平面解析(就像"系统在稳定区域")
- 对于 (就像"能量总是非负的")
🔍 SPRIM被动性的证明:
🚀 步骤1:原系统被动性 原RLC网络是被动的,因此:
- 是对称正定矩阵(电阻性元件消耗能量)(就像"电阻总是消耗能量")
- 是对称正定矩阵(电容性元件存储能量)(就像"电容总是存储能量")
🔄 步骤2:投影保持被动性 使用正交投影矩阵 (就像"保持物理定律的变换"):
由于 是正交矩阵,且 是对称正定的,因此 也是对称正定的(就像"保持物理定律的变换不会改变物理性质")。
🎯 步骤3:传递函数被动性 降阶系统的传递函数:
由于 在右半平面是可逆的,且 是对称正定的,因此 满足被动性条件(就像"降阶后的系统仍然遵守能量守恒")。
🌟 物理意义: 被动性保证了降阶模型在物理上是合理的,不会产生"负电阻"等非物理现象,这对于实际电路设计至关重要(就像"确保我们的模型不会违反物理定律")。
其中和都是对称正定矩阵,这保证了系统的被动性。
🎭 互易性保持
互易性是电路的重要物理特性,表示输入输出端口的互换性。SPRIM通过保持原系统的分块结构,确保降阶模型也保持互易性(就像"保持镜子的对称性"):
🔄 互易性的物理定义: 互易性(Reciprocity)是电路的基本物理定律,表示(就像"作用力与反作用力"):
- 如果在端口1施加电压,在端口2测量电流
- 与在端口2施加相同电压,在端口1测量电流
- 两种情况下测得的电流相等(就像"从A到B和从B到A是一样的")
📊 互易性的数学表达: 对于多端口网络,互易性表示为(就像"矩阵的对称性"):
其中 是从端口i到端口j的传递函数。
🌟 互易性的物理意义:
- ⚖️ 能量守恒:互易性保证了能量在系统中的守恒(就像"能量不会凭空消失")
- 🔄 对称性:反映了系统的内在对称性(就像"系统的左右对称")
- 🔄 可逆性:输入输出关系是可逆的(就像"可以正着走也可以倒着走")
🔍 SPRIM保持互易性的证明:
🚀 步骤1:原系统互易性 原RLC网络满足互易性,因此(就像"原系统是左右对称的"):
🔄 步骤2:投影保持互易性 使用结构保持投影(就像"保持对称性的变换"):
由于:
- 是对称的(就像"保持对称性")
- 是对称的(就像"保持对称性")
- 保持原系统的输入输出结构(就像"保持端口关系")
因此:
🎯 步骤3:结构保持的关键作用 SPRIM的结构扩展向量 是专门设计的,确保(就像"精心设计的对称变换"):
- 端口之间的耦合关系得到保持(就像"保持连接关系")
- 输入输出矩阵 保持原系统的对称性(就像"保持对称性")
- 降阶后的系统矩阵保持对称性(就像"降阶后仍然对称")
🔧 工程意义: 互易性的保持对于实际电路设计非常重要:
- 🏗️ 电路合成:互易性保证了降阶模型可以物理实现(就像"确保可以实际建造")
- 📊 仿真精度:保持了原系统的物理特性(就像"保持真实性")
- ✅ 设计验证:便于工程师验证设计的正确性(就像"便于检查")
🏗️ 二阶结构保持
SPRIM的降阶模型可以直接写成二阶形式(就像"用熟悉的语言描述"):
🌟 二阶形式的物理意义:
🎯 力学类比: 二阶形式与经典力学中的运动方程完全一致(就像"用牛顿定律描述电路"):
- :质量矩阵,对应系统的"惯性"(就像"物体的质量")
- :阻尼矩阵,对应系统的"能量损耗"(就像"空气阻力")
- :刚度矩阵,对应系统的"恢复力"(就像"弹簧力")
- :外力项(就像"外部推力")
⚡ 电路对应关系: 在RLC电路中(就像"电路与力学的对应关系"):
- :对应电感矩阵 (存储磁能)(就像"电感的惯性")
- :对应电阻矩阵 (消耗电能)(就像"电阻的损耗")
- :对应电容倒数矩阵 (存储电能)(就像"电容的弹性")
📊 二阶形式的数学推导:
🔄 从一阶形式到二阶形式: 设一阶形式为(就像"从速度描述到位置描述"):
通过变量替换 ,得到(就像"引入速度变量"):
🚀 二阶形式的优势:
- 🎯 物理直观:与力学系统形式一致,便于理解;各矩阵有明确的物理意义;便于工程师应用
- 🛡️ 数值稳定:在某些情况下具有更好的数值稳定性;便于应用专门的二阶系统求解器;减少数值误差的累积
- 🔍 分析便利:便于进行模态分析、固有频率分析和稳定性分析
🎯 实际应用: 二阶形式在结构动力学、机械系统、电路系统和控制系统等领域有广泛应用,与力学系统的运动方程完全一致,便于物理理解和工程应用。
批判性思考:SPRIM的局限与未来
⚠️ 当前局限
SPRIM虽然强大,但也有其局限性:
线性系统限制:SPRIM主要适用于线性、时不变、被动RLC电路。对于非线性或有源系统,SPRIM的直接应用存在困难。
大规模挑战:对于超大规模网络,结构分块与正定性检验具有工程挑战。
扩展性限制:SPRIM的方法相对固定,缺乏自适应能力。
🚀 未来发展方向
非线性扩展:将SPRIM扩展到非线性系统,这是一个极具挑战性的研究方向。
机器学习融合:结合机器学习技术,实现自适应的结构保持降阶。
大规模并行:开发适用于超大规模系统的并行SPRIM算法。
多物理场应用:将SPRIM扩展到电磁场、热场等多物理场耦合问题。
🎯 领域影响
SPRIM的出现对多个领域产生了深远影响:
VLSI设计:为大规模集成电路的互连线分析提供了高效工具。
射频微波:为高频电路设计提供了高精度仿真方法。
MEMS器件:为微机电系统的建模提供了新思路。
系统级仿真:为复杂系统的快速仿真提供了理论基础。
这篇文章展示了如何将复杂的数值计算技术用通俗易懂的方式呈现,希望能帮助更多读者理解降阶建模的美妙之处。如果你觉得这篇文章对你有帮助,欢迎点赞、收藏、分享!
参考资料
核心论文
- Freund, R. W. (2004). SPRIM: Structure-preserving reduced-order interconnect macromodeling. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 23(9), 1337-1359.
经典算法文献
- Hestenes, M. R., & Stiefel, E. (1952). Methods of conjugate gradients for solving linear systems. Journal of research of the National Bureau of Standards, 49(6), 409-436.
- Saad, Y. (2003). Iterative methods for sparse linear systems. SIAM.
- Golub, G. H., & Van Loan, C. F. (2013). Matrix computations. JHU press.
Krylov子空间方法
- Saad, Y. (2011). Numerical methods for large eigenvalue problems. SIAM.
- Trefethen, L. N., & Bau, D. (1997). Numerical linear algebra. SIAM.
- Arnoldi, W. E. (1951). The principle of minimized iterations in the solution of the matrix eigenvalue problem. Quarterly of applied mathematics, 9(1), 17-29.
降阶建模理论
- Antoulas, A. C. (2005). Approximation of large-scale dynamical systems. SIAM.
- Benner, P., et al. (2015). Model reduction for parametric systems using balanced truncation and interpolation. at-Automatisierungstechnik, 63(8), 580-595.
- Gugercin, S., et al. (2008). A survey of model reduction by balanced truncation and some new results. International Journal of Control, 81(4), 534-567.
电路仿真与建模
- Ruehli, A. E. (1974). Equivalent circuit models for three-dimensional multiconductor systems. IEEE Transactions on Microwave Theory and Techniques, 22(3), 216-221.
- Odabasioglu, A., et al. (1998). PRIMA: passive reduced-order interconnect macromodeling algorithm. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 17(8), 645-654.
- Silveira, L. M., et al. (1995). Efficient frequency-domain modeling and circuit simulation of transmission lines. IEEE Transactions on Components, Packaging, and Manufacturing Technology: Part B, 18(2), 194-202.
数值分析与优化
- Higham, N. J. (2002). Accuracy and stability of numerical algorithms. SIAM.
- Nocedal, J., & Wright, S. (2006). Numerical optimization. Springer Science & Business Media.